 Jet20¶
Jet20¶


Jet20 is a GPU Powered LP & QP solver. It provides three main features:
- A frontend for modeling LP & QP problem easily
- A backend based on pytorch
- Modular design, easy to extend
Note
- This is an alpha release and the project is still under heavy development.
- CrossOver is not supported currently.
- There is still rooms for improvement of memory usage, computation performance and stability.
- PRs and issues are welcome.
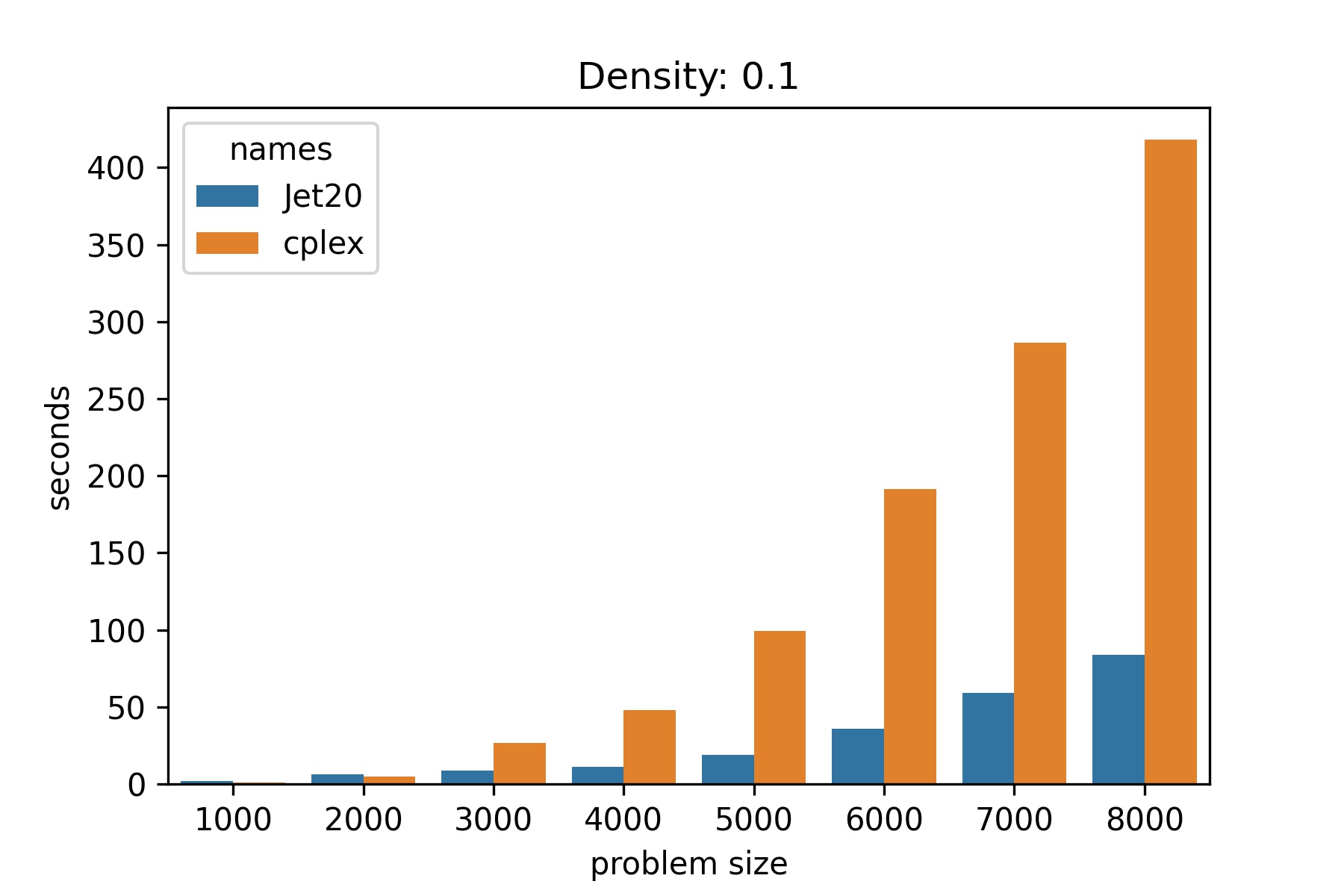
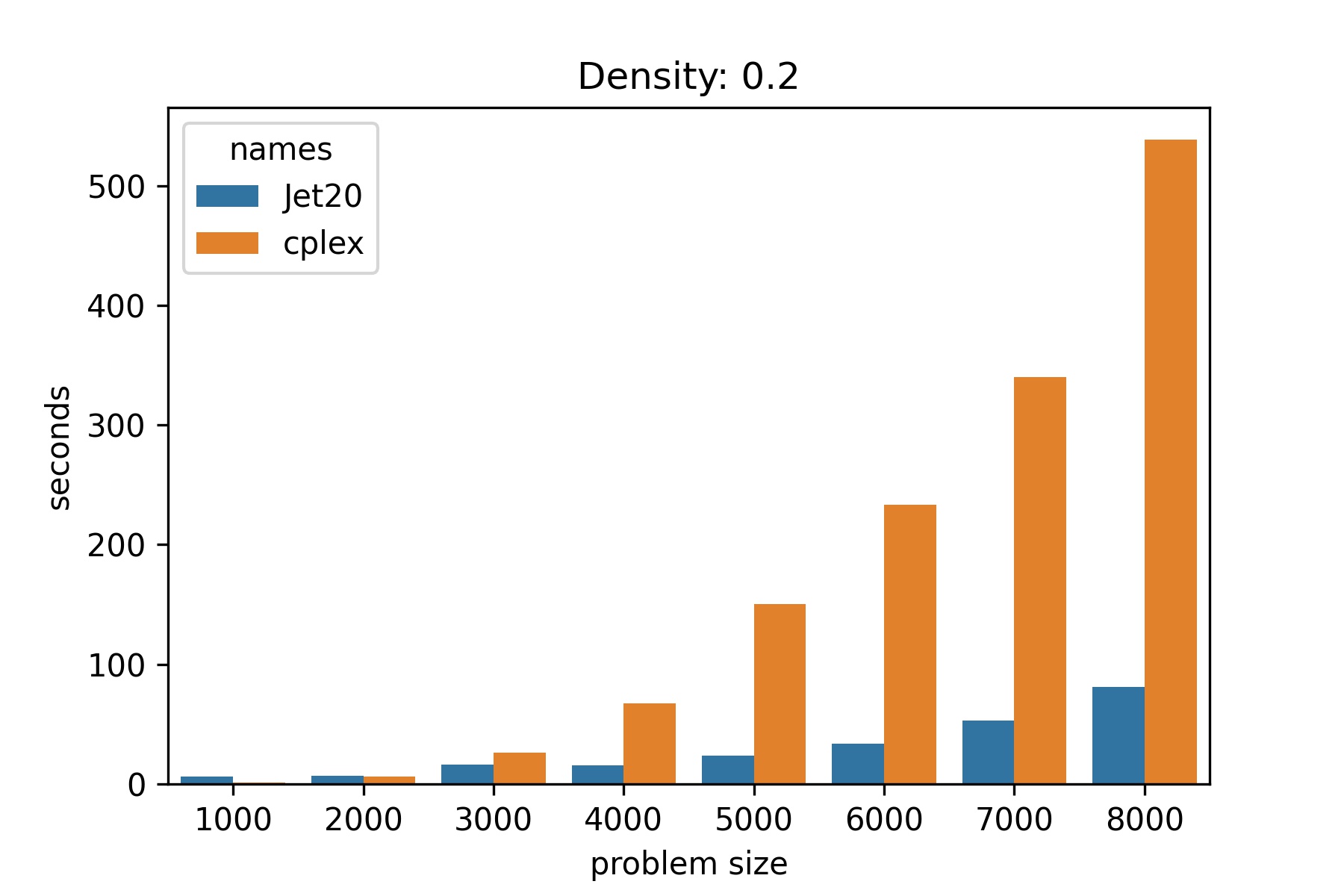
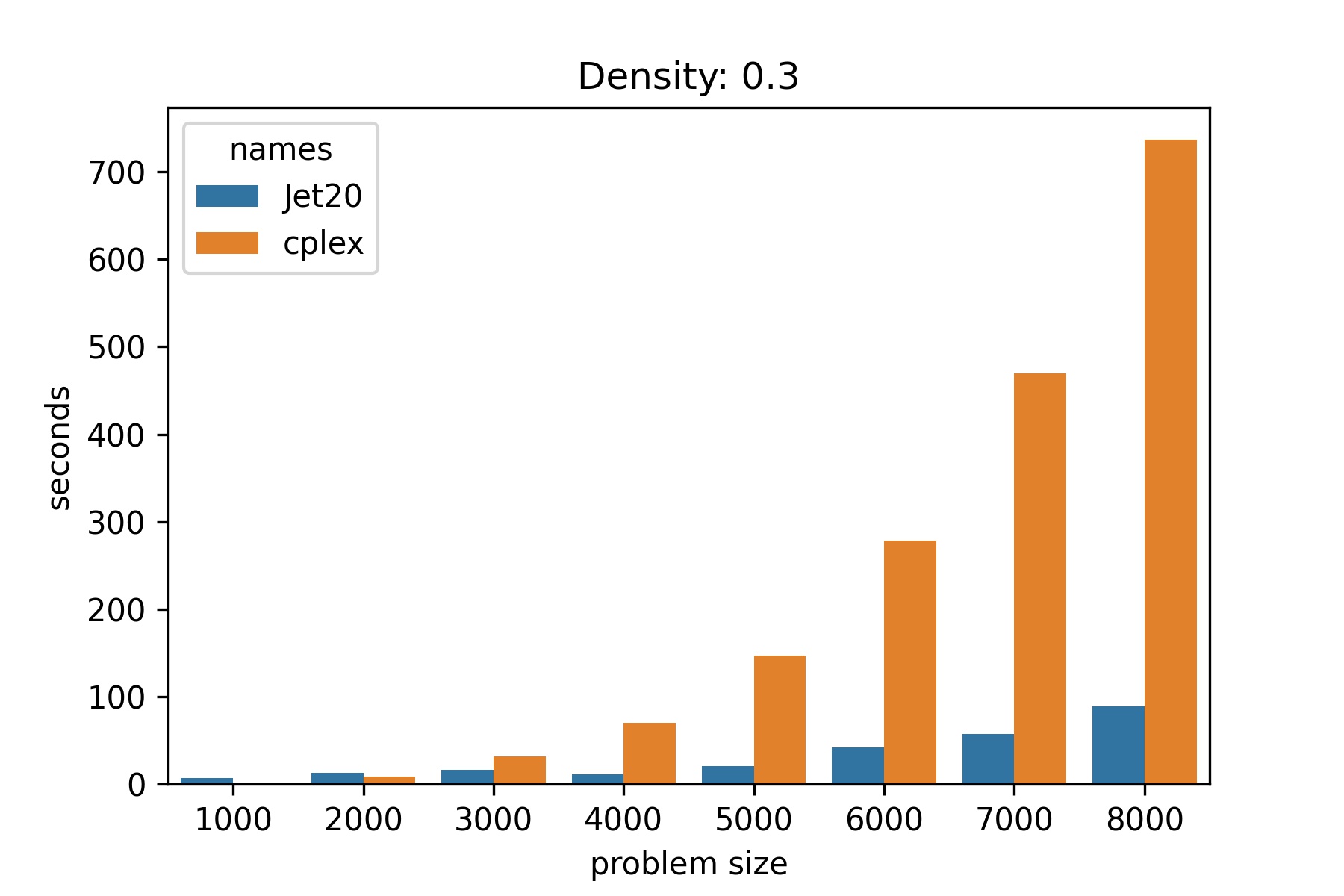
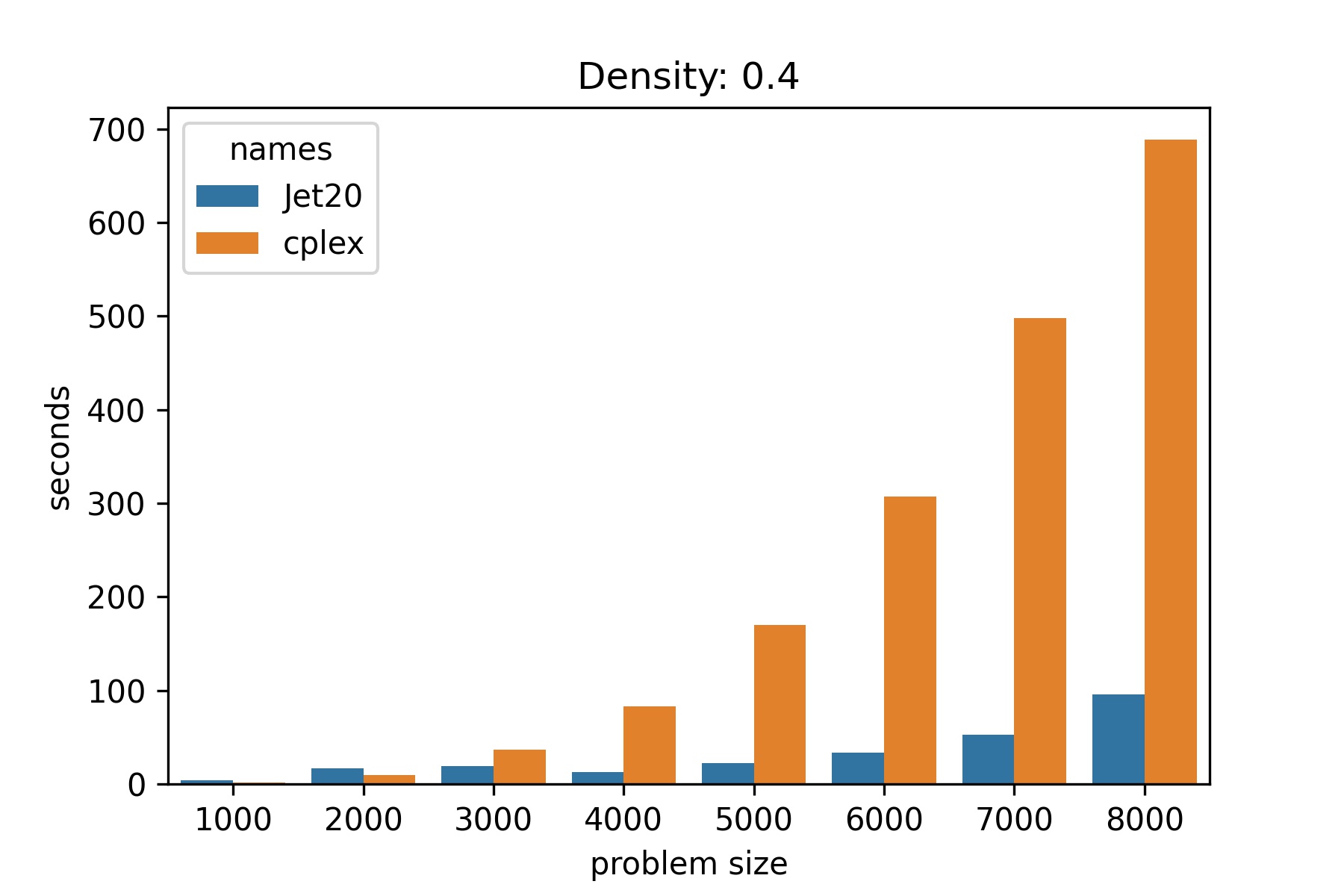
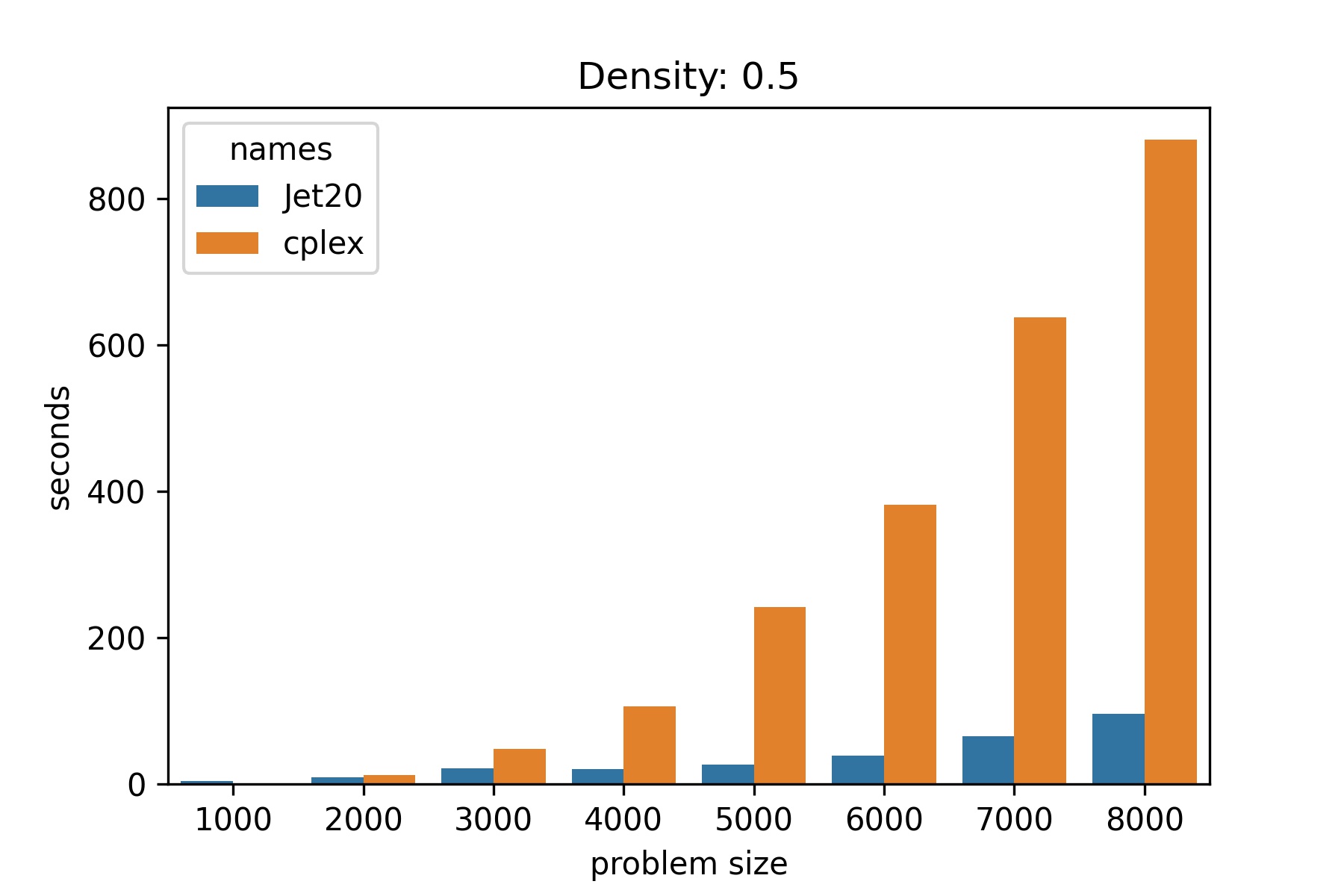
Performance¶
Benchmark on random generated LP problems with different sizes and density (ratio of non-zeros).
- Cplex running on Intel i9/2.3GHz/8cores while Jet20 running on single Nvidia 2080Ti.
- The size of the problem equals N refers to N varibles and N constraints.
Installation¶
To install Jet20, run this command in the terminal:
$ pip install jet20
This is the preferred method to install Jet20, as it will always install the most recent stable release.
If you don’t have pip installed, this Python installation guide can walk you through the process.
- Free software: MIT license
- Documentation: https://jet20.readthedocs.io.
Examples¶
- simple LP problem
p = Problem("test")
x1,x2,x3,x4 = p.variables("x1,x2,x3,x4",lb=0)
p.minimize(2 * x1 + 3 * x2 + x3 + 5 * x4)
p.constraints(x1 + x4 >= 1,
x2 + x4 >= 1,
x1 + x2 == 1,
x2 + x3 == 1)
solution = p.solve()
print (solution.obj_value)
print (solution.vars)
print (solution.status)
- simple LP problem, Matrix Form
A1 = np.array([ [1,0,0,1],
[0,1,0,1] ])
b1 = 1
A2 = np.array([ [1,1,0,0],
[0,1,1,0] ])
b2 = np.array([1,1])
c = np.array([2,3,1,5])
p = Problem("test")
xs = p.variables("x1,x2,x3,x4",lb=0)
p.minimize(c @ xs)
p.constraints(A1 @ xs >= b1,
A2 @ xs == b2)
solution = p.solve(device="cuda:0",opt_tolerance=1e-3,opt_constraint_tolerance=1e-5,rouding_precision=3)
print (solution)
- simple QP problem
p = Problem("test")
x1,x2,x3,x4 = p.variables("x1,x2,x3,x4",lb=0)
p.minimize(2*x1**2 + 3*x2**2 + x3**2 + 5*x4**2 + x1*x2 + 2*x2*x3 + 4*x1*x4)
p.constraints(x1 + x4 >= 1,
x2 + x4 >= 1,
x1 + x2 == 1,
x2 + x3 == 1)
solution = p.solve(device="cuda:0")
print (solution)
- simple QP problem, Matrix Form
np.random.seed(42)
A1 = np.array([ [1,0,0,1],
[0,1,0,1] ])
b1 = 1
A2 = np.array([ [1,1,0,0],
[0,1,1,0] ])
b2 = np.array([1,1])
c = np.array([2,3,1,5])
Q = np.random.randn(4,4)
Q = Q.T @ Q
p = Problem("test")
xs = p.variables("x1,x2,x3,x4",lb=0)
p.minimize(jet20.quad(Q,xs) + c @ xs)
p.constraints(A1 @ xs >= b1,
A2 @ xs == b2)
solution = p.solve(device="cpu",opt_tolerance=1e-8,opt_constraint_tolerance=1e-8,rouding_precision=3)
print (solution)
Road Map¶
- [ ] sparse tensor support
- [ ] crossover support
- [ ] stability improvement
- [ ] more documents
- [ ] more features
Credits¶
This package was created with Cookiecutter and the audreyr/cookiecutter-pypackage project template.